直角坐標機器人 vs. 關(guān)節(jié)型機器人 全面解析工業(yè)自動化兩大支柱

在工業(yè)自動化領(lǐng)域,機器人的形態(tài)多樣,各司其職。其中,直角坐標機器人和關(guān)節(jié)型機器人是最為常見且應用廣泛的兩大類。它們?nèi)缤詣踊a(chǎn)線上的‘左手’與‘右手’,憑借不同的結(jié)構(gòu)特點和運動方式,共同構(gòu)成了現(xiàn)代智能制造的核心力量。本文將從原理、特點、應用場景等方面,為您全面科普這兩種機器人。
一、 直角坐標機器人:精準的‘直線執(zhí)行者’
1. 結(jié)構(gòu)與原理
直角坐標機器人,又稱笛卡爾機器人或龍門式機器人,其結(jié)構(gòu)基于經(jīng)典的笛卡爾坐標系(X, Y, Z軸)。它通常由三個直線運動模塊(直線模組或絲杠)構(gòu)成,這三個模塊相互垂直安裝,通過伺服電機或步進電機驅(qū)動,實現(xiàn)末端執(zhí)行器在三維空間內(nèi)沿三個互相垂直的直線方向移動。
2. 核心特點
高精度與高剛性:由于是直線運動且結(jié)構(gòu)簡單,其定位精度非常高,重復定位精度可達微米級,且承載能力強,剛性出色。
運動直觀,編程簡單:其運動軌跡完全是直線或簡單的直線組合,坐標計算和控制邏輯相對簡單,易于編程和維護。
工作空間規(guī)則:其有效工作空間是一個規(guī)則的立方體或長方體區(qū)域,空間利用率高且易于規(guī)劃。
成本相對較低:結(jié)構(gòu)標準化程度高,模塊化設(shè)計使得其制造成本和維護成本通常低于同等負載的復雜關(guān)節(jié)機器人。
3. 典型應用場景
精密檢測與測量:如半導體行業(yè)的芯片檢測、LCD面板檢測。
高速拾放與搬運:流水線上的產(chǎn)品分揀、包裝、碼垛(尤其是規(guī)則包裝箱)。
點膠、涂膠與焊接:需要沿直線或平面軌跡進行的精密作業(yè)。
機床上下料:與CNC加工中心配合,實現(xiàn)自動化物料轉(zhuǎn)移。
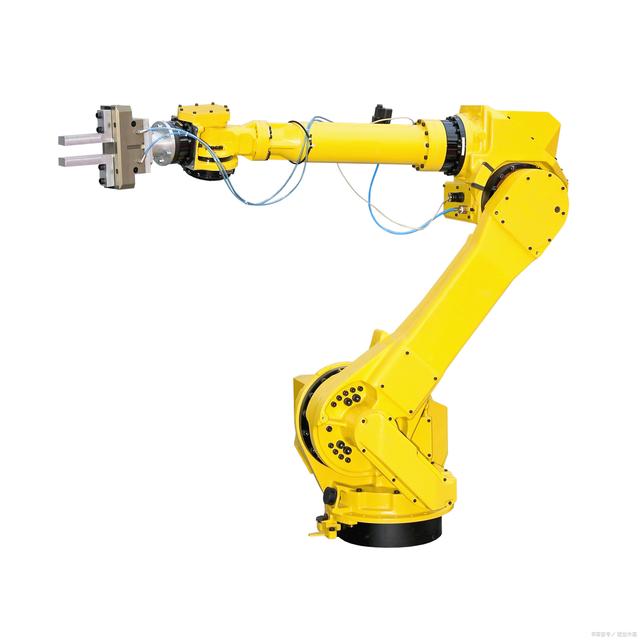
二、 關(guān)節(jié)型機器人:靈活的‘多面手’
1. 結(jié)構(gòu)與原理
關(guān)節(jié)型機器人模仿人類手臂的結(jié)構(gòu),由多個旋轉(zhuǎn)關(guān)節(jié)(也稱為‘軸’)連接而成。最常見的為六軸機器人,它擁有六個旋轉(zhuǎn)自由度(從基座到手腕),使其末端執(zhí)行器能夠在三維空間內(nèi)實現(xiàn)幾乎任意角度和位置的定位。
2. 核心特點
極高的靈活性:多關(guān)節(jié)設(shè)計使其工作范圍呈一個復雜的球形空間,能夠‘繞開’障礙物,到達直角坐標機器人難以觸及的角落。
多角度作業(yè)能力:末端工具可以以多種姿態(tài)接近工件,非常適合進行復雜的裝配、焊接(如汽車車身的多角度點焊、弧焊)等操作。
占地面積小:基座固定,通過手臂的伸展覆蓋較大工作區(qū)域,節(jié)省了地面空間。
運動控制復雜:需要復雜的坐標變換和運動學算法來控制各關(guān)節(jié)的協(xié)同運動,編程難度相對較高。
3. 典型應用場景
汽車制造:噴涂、焊接、總裝是關(guān)節(jié)機器人的傳統(tǒng)優(yōu)勢領(lǐng)域。
復雜裝配:電子產(chǎn)品的精密組裝,如手機、電腦的零部件安裝。
弧焊與激光焊接:需要焊槍以連續(xù)且靈活的姿態(tài)跟隨復雜焊縫。
打磨與拋光:對復雜曲面工件進行一致性處理。
三、 對比與選擇:如何為任務匹配最合適的機器人?
| 特性維度 | 直角坐標機器人 | 關(guān)節(jié)型機器人 |
| :--- | :--- | :--- |
| 運動方式 | 純直線運動(X, Y, Z) | 旋轉(zhuǎn)關(guān)節(jié)運動(多軸聯(lián)動) |
| 工作空間 | 規(guī)則立方體 | 近似球體,靈活性高 |
| 精度與剛性 | 極高,適合精密作業(yè) | 良好,但通常略低于同級別直角坐標機器人 |
| 靈活性 | 較低,軌跡為直線組合 | 極高,可實現(xiàn)復雜空間曲線 |
| 編程復雜度 | 簡單直觀 | 相對復雜 |
| 成本 | 通常較低(尤其是大行程應用) | 通常較高 |
| 典型形象 | 像一臺可精確定位的“數(shù)控機床”或“龍門吊” | 像一條靈活的“機械臂” |
選擇指南:
選擇直角坐標機器人,當您的需求是:大范圍、高精度、高負載的直線搬運;規(guī)則軌跡的重復作業(yè)(如碼垛、點膠);預算有限且對靈活性要求不高;工作空間需要完全自定義且形狀規(guī)則。
選擇關(guān)節(jié)型機器人,當您的需求是:在復雜、擁擠的空間內(nèi)進行多角度作業(yè)(如汽車車身內(nèi)部焊接);處理復雜曲線軌跡(如曲面噴涂、焊接);需要末端執(zhí)行器以特定姿態(tài)接近工件;追求單臺設(shè)備的最大化靈活性和可重部署能力。
###
直角坐標機器人與關(guān)節(jié)型機器人并非簡單的替代關(guān)系,而是互補共生。在現(xiàn)代智能工廠中,經(jīng)常能看到它們協(xié)同工作的場景:直角坐標機器人負責將工件精準地搬運到工位,而關(guān)節(jié)機器人則執(zhí)行精細的組裝或焊接。理解它們各自的特長,才能更好地利用這些自動化利器,為生產(chǎn)線賦予更高的效率、精度與柔性,共同推動‘中國智造’向前發(fā)展。
如若轉(zhuǎn)載,請注明出處:http://www.zsmeiyate.com.cn/product/15.html
更新時間:2026-06-01 23:12:25