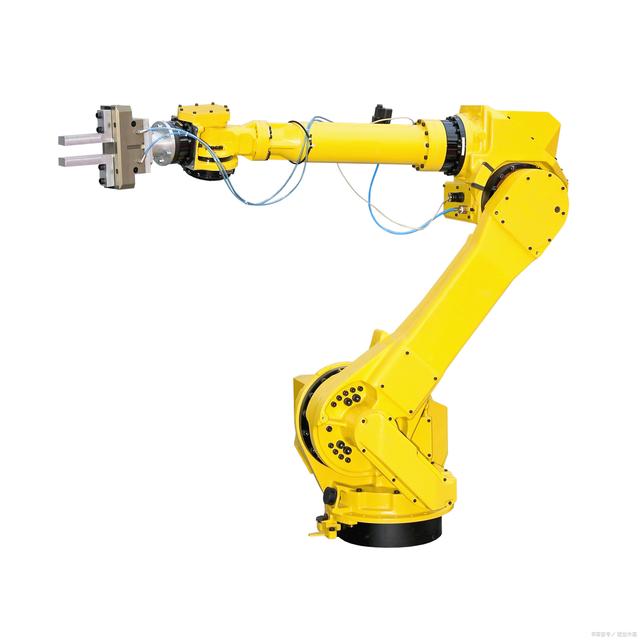
關節型機器人 工業自動化的靈活助手
關節型機器人,作為工業機器人中最常見、應用最廣泛的一類,其設計靈感來源于人類的手臂結構。它通過一系列旋轉關節來模擬肩、肘、腕等部位的運動,從而在三維空間內實現高度的靈活性和精確的操作能力。這種仿生設計使其成為現代智能制造、裝配、焊接、噴涂等領域的核心設備。
關節型機器人的核心結構通常包括基座、大臂、小臂和手腕等部分,由多個旋轉關節連接而成。最常見的為六軸關節機器人,擁有六個旋轉自由度,能夠實現接近人類手臂的全方位運動。每個關節由伺服電機驅動,并配備高精度減速器,確保運動的平穩與精準。其控制系統如同機器人的“大腦”,通過編程來規劃運動軌跡、控制速度和力度,并與外部傳感器、視覺系統協同工作,完成復雜的任務。
相比其他類型的機器人(如直角坐標機器人、SCARA機器人),關節型機器人的最大優勢在于其工作空間大、靈活性高。它能夠輕松地繞過障礙物,以多種姿態到達工作點,特別適合在復雜、擁擠的生產線上作業。從汽車制造業的精準點焊與噴涂,到電子行業的精密裝配,再到物流領域的碼垛與搬運,關節型機器人無處不在,極大地提升了生產效率和產品質量的一致性。
隨著技術的發展,關節型機器人正朝著更智能、更協作、更易用的方向演進。一方面,通過集成人工智能與機器學習算法,機器人能夠自主適應環境變化、優化操作流程。另一方面,輕量化設計與力控傳感器的應用催生了“協作機器人”,它們無需安全圍欄即可與人類并肩工作,開辟了人機協作的新篇章。云平臺和數字孿生技術的應用,使得機器人的遠程監控、預測性維護和離線編程成為可能,進一步降低了使用門檻和運維成本。
關節型機器人將繼續作為工業4.0和智能工廠的基石。它們將與物聯網、大數據深度融合,構建更加柔性、自適應的生產系統。其應用領域也將從傳統的工業制造向醫療手術、生活服務、太空探索等更廣闊的疆域拓展,持續推動社會生產力的變革與進步。
如若轉載,請注明出處:http://www.zsmeiyate.com.cn/product/14.html
更新時間:2026-06-01 20:53:56